BASE
STATION CONTROLLER (BSC)
FUNGSI BSC
BSC mengontrol bagian utama dari jaringan radio (RBS).
Tugas yang paling penting adalah untuk memastikan kemungkinan tertinggi
utilisasi dari radio resources.
Fungsi utama dari area BSC adalah:
1) Manajemen Radio Network
2) Manajemen RBS
3) Penanganan TRC
4) Manajemen Jaringan Transmisi
5) Operasi internal BSC dan Pemeliharaan
6) Penanganan koneksi MS
1. Manajemen Jaringan Radio
Manajemen jaringan radio meliputi tugas-tugas berikut:
• Administrasi data jaringan radio diantaranya:
-
Deskripsi Data Cell (misalnya identitas sel, nomor saluran BCCH, kekuatan
output maksimum dan minimum dalam sel, jenis RBS, dll)
-
Sistem Informasi Data (misalnya informasi tentang apakah ada atau tidak
pelarangan akses sel, daya output maksimum yang diperbolehkan dalam sel, identitas
saluran BCCH dalam sel tetangga)
-
Penempatan Data (misalnya peringkat sel yang digunakan dalam HCS dan situasi
beban lalu lintas yang tinggi )
-
Pembagian beban sharing data, parameter yaitu untuk memaksa penyerahan awal
dari sel padat
• Traffic dan pengukuran event (misalnya, jumlah
upaya panggilan, kepadatan, tingkat lalu lintas untuk sel, tingkat lalu lintas
untuk MS, jumlah handover, jumlah koneksi menurun, dll).
• Pengukuran Channel Idle
RBS mengumpulkan statistik dari MS tentang kekuatan dan kualitas sinyal.
Statistik ini kemudian digunakan selama proses alokasi kanal, sehingga saluran
dengan interferensi rendah dialokasikan untuk panggilan.
2. Manajemen RBS
Implementasi RBS Ericsson adalah transceiver-terorientasi, memastikan
fitur redundansi yang baik. Ini berarti bahwa sedikit mungkin peralatan untuk
beberapa transceiver.
Tugas utama manajemen RBS adalah:
• Konfigurasi RBS:
Ini melibatkan alokasi frekuensi untuk kombinasi
saluran dan tingkat daya untuk setiap sel sesuai dengan peralatan yang tersedia.
Jika peralatan rusak, maka akan menyebabkan hilangnya saluran yang penting, dan
rekonfigurasi peralatan yang diaktifkan, mengorbankan saluran yang kurang
penting.
• Penanganan software RBS:
Hal ini melibatkan kontrol beban Program.
• Pemeliharaan peralatan RBS (RBS Maintenance):
Kesalahan RBS serta gangguan dicatat dan ter-log secara terus menerus.
3. Penanganan TRC
Meskipun TRAUs terletak di TRC, Sebuah BSC sebagai
pengendali sumber daya radio dari jaringan GSM, sebenarnya mengkoordinasikan
sumber dari TRAU untuk panggilan. Selama call set-up, BSC menginstruksikan TRC
untuk mengalokasikan perangkat TRA untuk panggilan. Jika tersedia, TRC
mengkonfirmasi alokasi perangkat TRA. Perangkat TRA dianggap berada di bawah
kendali BSC selama panggilan.
4. Manajemen Jaringan Transmisi
Jaringan transmisi untuk BSC termasuk link ke dan dari MSC / VLR dan RBS.
Dalam hal ini melibatkan tugas-tugas berikut:
• Penanganan Transmisi Interface
Bagian ini menyediakan fungsi untuk administrasi, pengawasan, pengujian
dan kesalahan lokalisasi link ke RBS. BSC mengkonfigurasi, mengalokasikan dan
mengawasi 64 kbits / s sirkuit link PCM ke RBS. Bagian ini juga secara langsung
mengontrol remote switch di RBS yang mengaktifkan penggunaan efisien dari sirkuit
64 kbits / s.
5. Operasi Internal BSC dan
Pemeliharaan
Operasi dan pemeliharaan tugas dapat dilakukan secara lokal di BSC atau
jarak jauh dari OSS. Operasi internal BSC dan pemeliharaan melibatkan fitur
berikut:
• Pemeliharaan TRH:
Administrasi, pengawasan dan pengujian Transceiver
Handler (TRH) dilakukan dalam BSC. TRH terdiri dari hardware dan software.
Sebuah TRH terletak pada Regional Processor for the Group (RPG). Satu RPG melayani
beberapa transceiver. Terdapat beberapa RPG di BSC.
• Kontrol beban Processor di BSC
Fungsi ini memastikan bahwa bila prosesor dalam situasi
yang berlebihan, sejumlah besar panggilan masih bisa ditangani oleh BSC. Jika
terlalu banyak panggilan yang diterima, persyaratan
real time seperti waktu call set-up tidak dapat dipenuhi. Untuk mencegah hal
ini, beberapa panggilan perlu ditolak jika situasi beban tinggi.
6. Penanganan Koneksi MS
A. Call Set Up
Call Set up melibatkan proses berikut:
• Paging:
BSC mengirimkan pesan paging ke RBS didefinisikan dalam LA. Situasi beban
di BSC diperiksa sebelum perintah paging dikirim ke RBS.
• Signaling set-up:
Selama call set-up, koneksi MS ditransfer ke SDCCH
dialokasikan oleh BSC. Jika MS memulai koneksi, BSC memeriksa beban prosesor
sebelum permintaan diproses lebih lanjut.
• Penugasan kanal trafik:
Setelah SDCCH diterima, prosedur call set-up terus dilakukan dengan tugas
dari TCH oleh BSC. Karena ini terjadi, fungsi pengawasan kanal radio di BSC
diinformasikan bahwa MS telah diperintahkan untuk mengubah saluran.
B. Selama Panggilan
Fungsi utama BSC selama panggilan adalah:
• Power Control Dinamis di MS dan RBS:
BSC menghitung daya output MS dan BTS yang memadai
berdasarkan pengukuran yang diterima dari uplink dan downlink. Hal ini dikirim
ke BTS dan MS setiap 480 ms untuk menjaga kualitas koneksi yang baik.
• Locating:
Fungsi ini terus menerus mengevaluasi hubungan radio
ke MS, dan, jika perlu, menyarankan peralihan ke sel lain. Saran ini berisi
daftar handover calon sel. Keputusan ini didasarkan pada hasil pengukuran dari
MS dan BTS. Proses locating diproses di BSC.
• Handover:
Jika fungsi locating mengusulkan bahwa handover harus
berlangsung, BSC kemudian memutuskan sel yang akan handover dan memulai proses
handover. Jika sel milik BSC lain, MSC / VLR harus terlibat dalam handover.
Namun, dalam handover, maka sebuah MSC / VLR dikontrol oleh BSC. Tidak ada
pengambilan keputusan dilakukan di MSC karena tidak memiliki informasi real
time tentang sambungan.
• Frekuensi Hopping:
Dua jenis hopping didukung oleh BSC:
- Baseband hopping:
ini melibatkan hopping antara frekuensi pada transceiver yang berbeda dalam sel.
- Synthesizer hopping: Hal ini melibatkan hopping dari frekuensi ke frekuensi
pada transceiver yang sama dalam sebuah sel.

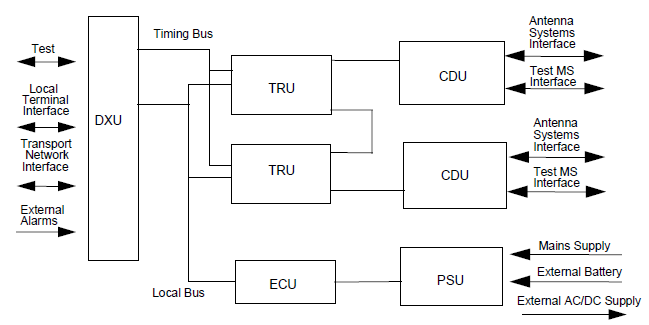
Konfigurasi Hardware pada BSC
Regional Processor (RP) melakukan semua penanganan protokol
dan kapasitas yang menuntut pekerjaan menjaga CP untuk melakukan program dan
penanganan data. Transceiver Handler (TRH) menangani pengukuran processing
untuk algoritma locating dari pelanggan seluler. Signalling Terminal Central
(STC) digunakan untuk berkomunikasi dengan remote regional prosesor dan
digunakan ketika berkomunikasi dengan Radio Base Station (RBS). Panggilan dari
MSC akan ditangani oleh semi-permanent grup switch dan dikirim ke BTS melalui
Exchange Terminal Circuits (ETC).